mpu6050.h 的引用(Include)关系图:
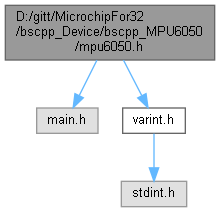
此图展示该文件直接或间接的被哪些文件引用了:
函数 | |
| u8 | MPU_Init (void) |
| 初始化MPU6050 更多... | |
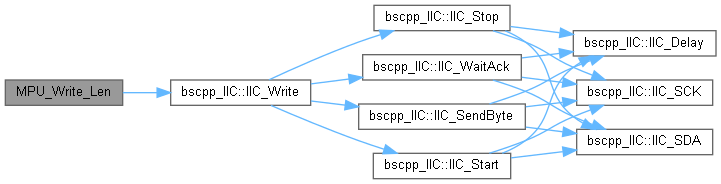
| u8 | MPU_Write_Len (u8 addr, u8 reg, u8 len, u8 *buf) |
| IIC连续写 更多... | |
| u8 | MPU_Read_Len (u8 addr, u8 reg, u8 len, u8 *buf) |
| IIC连续读 更多... | |
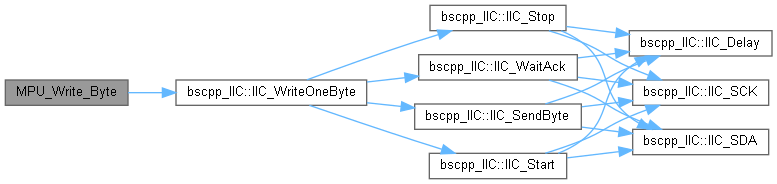
| u8 | MPU_Write_Byte (u8 reg, u8 data) |
| IIC写一个字节 更多... | |
| u8 | MPU_Read_Byte (u8 reg) |
| IIC读一个字节 更多... | |
| u8 | MPU_Set_Gyro_Fsr (u8 fsr) |
| 设置MPU6050陀螺仪传感器满量程范围 更多... | |
| u8 | MPU_Set_Accel_Fsr (u8 fsr) |
| 设置MPU6050加速度传感器满量程范围 更多... | |
| u8 | MPU_Set_LPF (u16 lpf) |
| 设置MPU6050的数字低通滤波器 更多... | |
| u8 | MPU_Set_Rate (u16 rate) |
| 设置MPU6050的采样率(假定Fs=1KHz) 更多... | |
| u8 | MPU_Set_Fifo (u8 sens) |
| short | MPU_Get_Temperature (void) |
| 得到温度值 更多... | |
| u8 | MPU_Get_Gyroscope (short *gx, short *gy, short *gz) |
| 得到陀螺仪值(原始值) 更多... | |
| u8 | MPU_Get_Accelerometer (short *ax, short *ay, short *az) |
| 得到加速度值(原始值) 更多... | |
宏定义说明
◆ MPU_ACCEL_CFG_REG
◆ MPU_ACCEL_XOUTH_REG
◆ MPU_ACCEL_XOUTL_REG
◆ MPU_ACCEL_YOUTH_REG
◆ MPU_ACCEL_YOUTL_REG
◆ MPU_ACCEL_ZOUTH_REG
◆ MPU_ACCEL_ZOUTL_REG
◆ MPU_ADDR
◆ MPU_CFG_REG
◆ MPU_DEVICE_ID_REG
◆ MPU_FIFO_CNTH_REG
◆ MPU_FIFO_CNTL_REG
◆ MPU_FIFO_EN_REG
◆ MPU_FIFO_RW_REG
◆ MPU_GYRO_CFG_REG
◆ MPU_GYRO_XOUTH_REG
◆ MPU_GYRO_XOUTL_REG
◆ MPU_GYRO_YOUTH_REG
◆ MPU_GYRO_YOUTL_REG
◆ MPU_GYRO_ZOUTH_REG
◆ MPU_GYRO_ZOUTL_REG
◆ MPU_I2CMST_CTRL_REG
◆ MPU_I2CMST_DELAY_REG
◆ MPU_I2CMST_STA_REG
◆ MPU_I2CSLV0_ADDR_REG
◆ MPU_I2CSLV0_CTRL_REG
◆ MPU_I2CSLV0_DO_REG
◆ MPU_I2CSLV0_REG
◆ MPU_I2CSLV1_ADDR_REG
◆ MPU_I2CSLV1_CTRL_REG
◆ MPU_I2CSLV1_DO_REG
◆ MPU_I2CSLV1_REG
◆ MPU_I2CSLV2_ADDR_REG
◆ MPU_I2CSLV2_CTRL_REG
◆ MPU_I2CSLV2_DO_REG
◆ MPU_I2CSLV2_REG
◆ MPU_I2CSLV3_ADDR_REG
◆ MPU_I2CSLV3_CTRL_REG
◆ MPU_I2CSLV3_DO_REG
◆ MPU_I2CSLV3_REG
◆ MPU_I2CSLV4_ADDR_REG
◆ MPU_I2CSLV4_CTRL_REG
◆ MPU_I2CSLV4_DI_REG
◆ MPU_I2CSLV4_DO_REG
◆ MPU_I2CSLV4_REG
◆ MPU_INT_EN_REG
◆ MPU_INT_STA_REG
◆ MPU_INTBP_CFG_REG
◆ MPU_MDETECT_CTRL_REG
◆ MPU_MOTION_DET_REG
◆ MPU_PWR_MGMT1_REG
◆ MPU_PWR_MGMT2_REG
◆ MPU_SAMPLE_RATE_REG
◆ MPU_SELF_TESTA_REG
◆ MPU_SELF_TESTX_REG
◆ MPU_SELF_TESTY_REG
◆ MPU_SELF_TESTZ_REG
◆ MPU_SIGPATH_RST_REG
◆ MPU_TEMP_OUTH_REG
◆ MPU_TEMP_OUTL_REG
◆ MPU_USER_CTRL_REG
函数说明
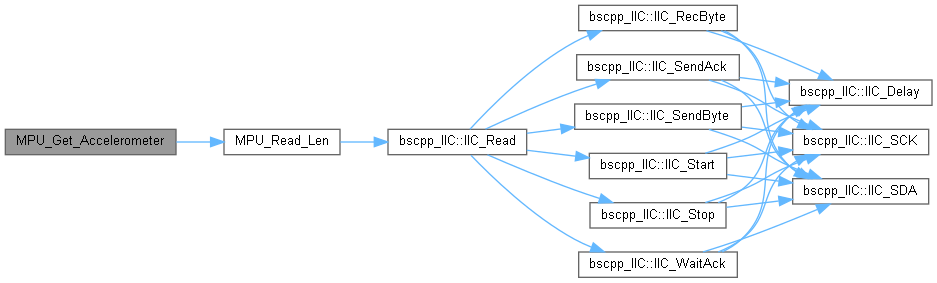
◆ MPU_Get_Accelerometer()
| u8 MPU_Get_Accelerometer | ( | short * | ax, |
| short * | ay, | ||
| short * | az | ||
| ) |
得到加速度值(原始值)
- 参数
-
ax 陀螺仪a轴的原始读数(带符号) ay 陀螺仪a轴的原始读数(带符号) ax 陀螺仪a轴的原始读数(带符号)
- 返回
- 0,设置成功
在文件 mpu6050.cpp 第 137 行定义.
函数调用图:
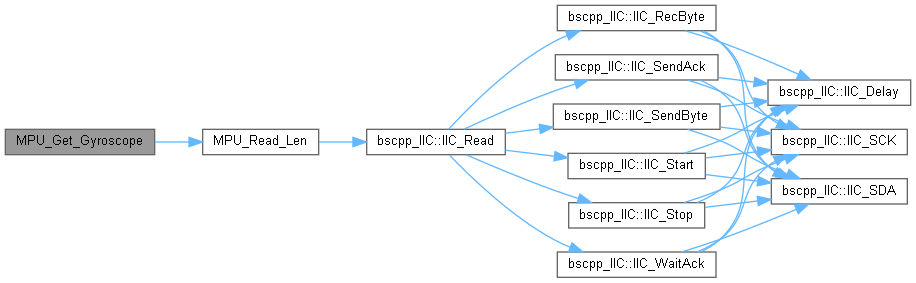
◆ MPU_Get_Gyroscope()
| u8 MPU_Get_Gyroscope | ( | short * | gx, |
| short * | gy, | ||
| short * | gz | ||
| ) |
得到陀螺仪值(原始值)
- 参数
-
gx 陀螺仪x轴的原始读数(带符号) gy 陀螺仪y轴的原始读数(带符号) gx 陀螺仪z轴的原始读数(带符号)
- 返回
- 0,设置成功
在文件 mpu6050.cpp 第 121 行定义.
函数调用图:
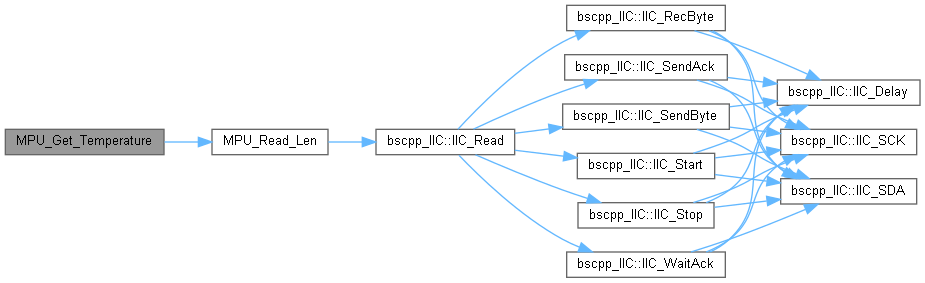
◆ MPU_Get_Temperature()
| short MPU_Get_Temperature | ( | void | ) |
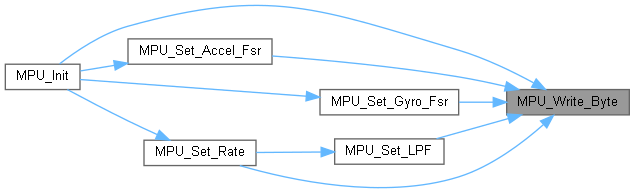
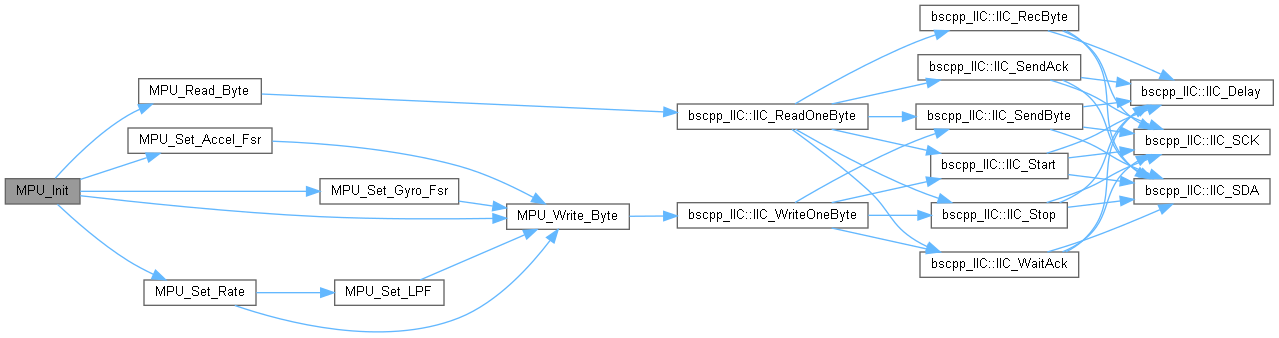
◆ MPU_Init()
| u8 MPU_Init | ( | void | ) |
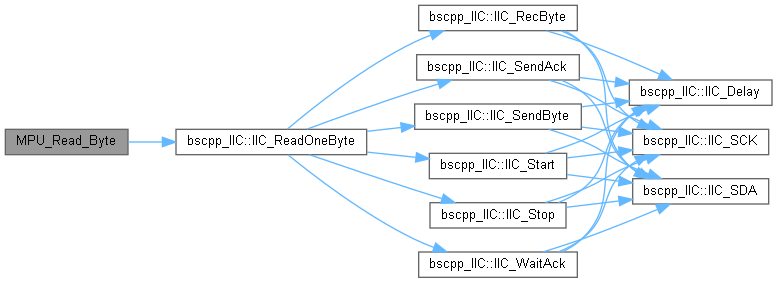
◆ MPU_Read_Byte()

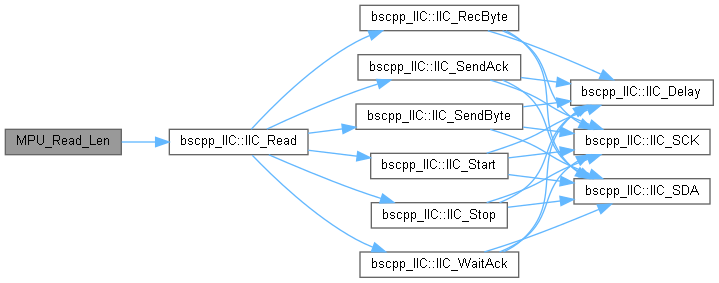
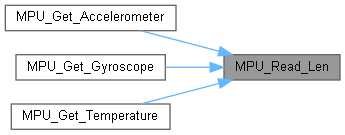
◆ MPU_Read_Len()
IIC连续读
- 参数
-
addr 器件地址 reg 寄存器地址 len 读取长度 *buf 读取数据区
- 返回
- 0,设置成功
在文件 mpu6050.cpp 第 168 行定义.
函数调用图:
这是这个函数的调用关系图:
◆ MPU_Set_Accel_Fsr()
设置MPU6050加速度传感器满量程范围
- 参数
-
fsr 0,±2g 1,±4g 2,±8g 3,±16g
- 返回
- 0,设置成功
在文件 mpu6050.cpp 第 67 行定义.
函数调用图:

这是这个函数的调用关系图:

◆ MPU_Set_Fifo()
◆ MPU_Set_Gyro_Fsr()
设置MPU6050陀螺仪传感器满量程范围
- 参数
-
fsr 0,±250dps 1,±500dps 2,±1000dps 3,±2000dps
- 返回
- 0,设置成功
在文件 mpu6050.cpp 第 55 行定义.
函数调用图:

这是这个函数的调用关系图: